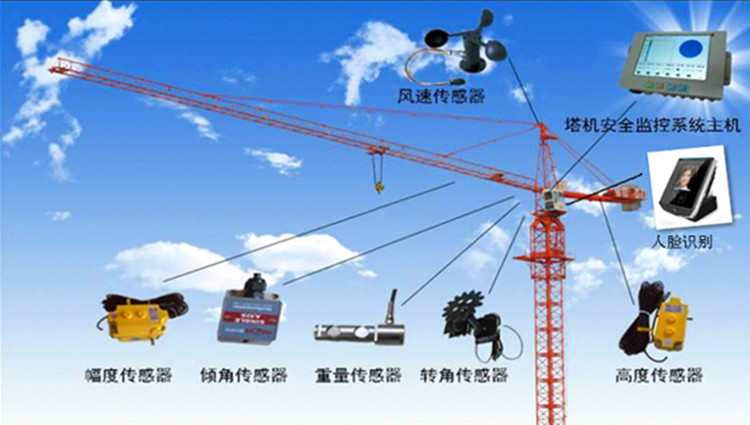
由安装于塔吊吊臂、塔身及传动结构处的各类传感器、驾驶室的黑匣子、塔司的人脸别识考勤、无线通讯模块以及在远程服务器部署的可视化系统组成。系统可实时获取塔吊当前运行参数,对塔吊起重量、起重力矩、起升高度、幅度、回转角度等进行精i确控制,同时配备预警限位控制系统、超载预警、三维立体防碰撞、大臂绞盘防跳槽视频监控等以实现塔机运行状态以及群塔交叉作业情况的实时监控。
吊钩可视化监控管理系统根据实际施工情况,系统能实时以高清晰图像向塔吊司机展现吊钩周围实时的视频图像,使司机能够快速准确的做出正确的操作和判断,解决了施工现场塔吊司机的视觉死角、远距离视觉模糊、指挥人员语音指挥易出差错等行业难题。能够有效避免事故的发生。
产品解决方案
2018 年合肥嘉联智能科技有限公司的技术团队针对性的开发了新型的吊装可视化系统,并且目前在几十个工地的上百个塔机均得到了验证,克服了上代产品出现的各种弊端,同时也解决了各厂家、各型号塔机安装的适用性。
可视化系统解决方案
系统主要分为三部分:
2.1 移动端(摄像机端):
移动端安装在小车上面,随着小车的运动而运动,摄像机垂直拍摄小车下方吊钩,从而实现吊装盲区可视化。移动端通过内置的锂电池供电维持当天的工作,通过无线设备与主机端进行视频及控制命令传输,向主机传输视频信号、执行主机发送过来的变焦控制命令,实现根据吊钩距离的远近而进行焦距的调整。在小车近端限位附近安装有充电触头,每天晚上驾驶员仅需要将小车开回近端,通过充电触头、充电导轨实现对移动端锂电池的夜间充电,每次满电设计使用时间不低于 15 小时。为了达到节约用电的目的,在连续一小时的停止吊装后,移动端会自动关闭摄像机从而进入低功耗状态,塔吊再次开始吊装作业,摄像机会重新开启实现吊装视频全过程拍摄。
2.2 主机端:
主机端包含控制主机及显示屏,实现视频信号的接收与解码,从而驾驶员可以清晰的看到吊装视频。主机还负责实时监测当前吊钩高度,并根据当前吊钩高度计算变焦数据,发送控制命令到移动端。
2.3 高度监测端:
高度监测,是一种高度监测传感器,用于监测当前吊钩距离大臂的距离,将距离值转变成电信号量传导给主机端,是该系统不可缺少的一部分。
传
1、 新一代吊装可视化系统与其它系统对比有如下优点:
2、新系统没有安全隐患,一次安装即可。
3、新系统安装简便,没有安装风险,安装时需要把小车收回到近处,进行安装。没有长距离布线。
4、新系统系统简易,主要分部分,各自安装完毕即可,体积小,占用空间小。
5、新系统稳定性高,完全做到了免维护,此处较上一代产品得到了极大的提高。
6、新系统,增加了高度矫正功能,方便后期的顶升,更换钢丝绳等,对软件标定依赖程度低。
相比较其他解决方案,本方案突出的地方是:本系统实现了摄像机的全自动变倍变焦,系统集成度高,结构清晰稳定,标准化程度高,功能强大。
塔吊可视化系统功能介绍:
三维立体防碰撞:可在群塔交叉作业时自动监控塔吊的运行状态、旋转角度等。当大臂发生碰撞等安全隐患时,系统自动预警并显示碰撞轨迹。

-/gbaciei/-
http://www.shrrhb.com